
My name is Julen, and I am a researcher in Robot Learning. I am currently an Applied Scientist at Amazon FAR, working on dexterous manipulation. Previously, I was a Research Scientist in the Robotics group at META FAIR. Before that, I was a postdoctoral researcher at the Intelligent Autonomous Systems lab (IAS) and DFKI.
I received my PhD in Computer Science with summa cum laude from TU Darmstadt under the supervision of Prof. Jan Peters. Previously, I interned as a researcher at Nvidia's Seattle Robotics Lab (SRL). My research has received several awards including multiple best paper awards, and I was a finalist for the George Giralt PhD award. I was honoured to be selected as an R:SS Pioneer in 2023.
I am particularly interested in figuring out the foundations for building generalist robots. I think this goal can only be achieved by figuring out novel strategies to scale the available data for robotics and finding novel algorithmic and architectural elements to enhance the generalization of our systems. In this direction, I explore the combination of fields such as deep generative models, 3D robot learning, learning from video, and optimization.
If you have any questions or want to collaborate, feel free to send me an email! I am always excited to learn more by talking with people. Please include "HEYJULEN" in the subject so that I don't miss it.
 SE(3)-DiffusionFields · ICRA 2023
SE(3)-DiffusionFields · ICRA 2023
 PianoMime · CoRL 2024
PianoMime · CoRL 2024
 ActionFlow · 2024
ActionFlow · 2024
 NEAR · ICLR 2025
NEAR · ICLR 2025
 Implicit Priors for Motion Opt. · IROS 2022
Implicit Priors for Motion Opt. · IROS 2022
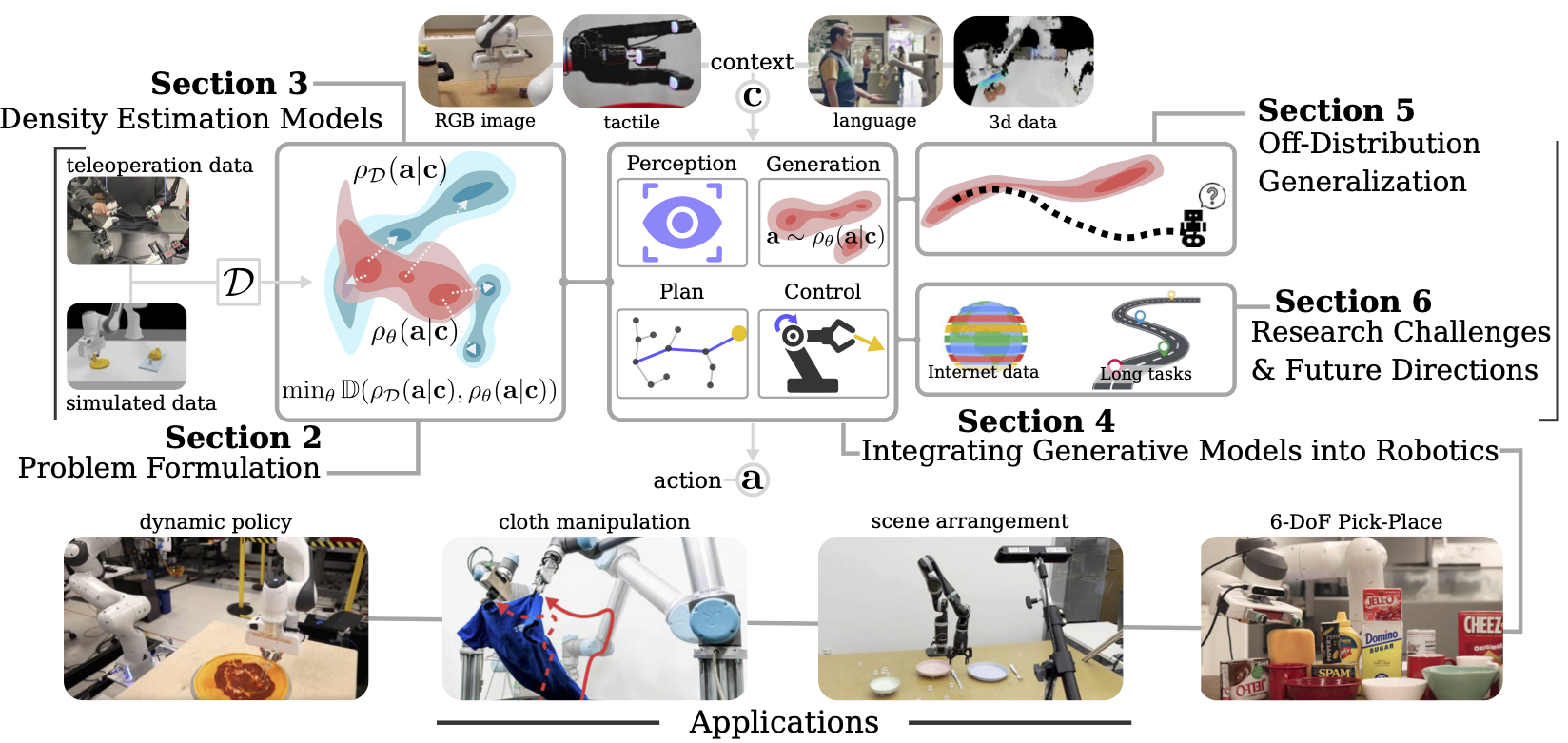 DGMs in Robotics: Survey · TRO 2025
DGMs in Robotics: Survey · TRO 2025
 Global Tensor Motion Planning · RA-L 2025
Global Tensor Motion Planning · RA-L 2025
 AINA · ICRA 2026
AINA · ICRA 2026